蜂巢箱遠端監測系統結合AI精準預測花期
西班牙科爾多瓦大學研究團隊開發了一套蜂巢箱監測系統,透過感測器紀錄蜂巢箱重量變化,並結合蜜蜂行為模式,利用人工智慧即時分析花期階段,為養蜂管理提供科學化的決策工具。

智慧農業機器人的技術現況與展望
蔡清池
國立中興大學電機系終身特聘教授
國立中興大學副研發長
台灣機器人學會理事長
國際模糊系統學會當選理事長
戴逢均
國立中興大學電機系博士後研究員
繼精準農業[1]後,我國現階段的智慧農業發展策略,如行政院農委會的「智慧農業4.0」[2] 與行政院科技部生科司的「智慧科技於農業生產之應用」[3] 等計畫,著重於智慧科技在智慧農業生產及數位服務之應用。智慧農業生產的推動目標[3]是減少極端氣候造成之農損、紓解農村高齡化及從農人力短缺、提升水資源之有效利用、解決農業栽培及漁、畜飼養過程產生之廢棄物處理等問題,達成資源循環利用、環境友善及農業永續。該智慧農業的發展策略將藉由智慧農業創新科技的投入及研發,利用全方位的思考,整合農業生產所需之系統化智慧農業機器及技術,促使未來農業生產朝向省時、省力、省工、精緻化及資源再利用之智慧農作栽培及漁、畜飼養模式,並建立安全且便利的農作環境,使臺灣農業邁向年輕化、高競爭力的農業型態進而發展具有國際競爭力的輸出產業。
依據精準農業的議題與相關技術[1]與上述的科技部與農委會所提的智慧農業目標與策略[2-3],新版的智慧農業實現情境可想像如下的情景。攜帶有多種不同功能攝影機器的智慧無人飛機穿梭於農田或農場上空,一邊監控作物或漁畜生長狀況,一邊將資料無線傳送雲端,透過邊緣與雲端運算,進行符合成本與對環境傷害最少的農藥與化肥施用分析及對水資源最有效的管理,或對漁畜生長提出最佳的飼養策略與繁殖環境。農民只要透過一只手機或平板電腦連上雲端,即能輕鬆完成「巡田」、「農作」或「飼養」等任務。以農作而言,農民可利用大數據與人工智慧系統的分析,可瞭解作物特性,以適時調整土壤類型微量元素與養分、灌溉行程、作物輪作以及其他生長條件;使用葉片感應器測量植物含水量的壓力,用土壤感應器蒐集水移動方式並追蹤土壤濕度、碳及土壤溫度或密實度的改變,可優化灌溉工作,避免作物受損。農民更可拍攝作物,然後上傳資料庫,提供每日參考價格,作物售出時系統即時提供資訊,讓農民不需離開農場,就能參與全球經濟活動。在消費端,消費者經由掃描包裝上的二維條碼( QR Code) ,可在家輕鬆看到作物與漁畜生長生長的自動化環控廠房生長採收與飼養及採收過程;遠在國外的通路商則可藉由農業雲供應鏈系統將臺灣外銷的農產品迅速在國際連鎖超市鋪貨;而經由雲端下單訂購數個月後的農作訂單,農場工作人員同時正藉由 RFID 系統準備這批要內外銷的農作菌種,種苗或漁畜。
達成智慧農業生產的願景與應用需求,需要許多的智慧物聯網與智慧農業機器及技術方能達成,這些的技術涵蓋自動化環境控制裝置,多感測器,農用物聯網,人工智慧,農用無人機與農用機器人。智慧農業所使用的自動化環境控制裝置與過去農業自動化與精準農業所使用的自動化技術大致相同(如種苗生產自動化,自動化栽培設施, 農藥及肥料施用自動化,田間作業自動化,作物採收自動化,農產品收穫後處理與儲運自動化與農產品廢棄物處理自動化等),所不同的是一些基於人工智慧的新創智能裝置或設備將會因應需求而生。農用感測器涵蓋範圍廣泛,可用於農作微氣候,量測的土壤中微量元素與養分、土壤濕度、碳及土壤溫度或密實度,灌溉水高度,作物高度,病蟲害病徵,蒸散作用,光合作用,葉片含水量的壓力,熱影像,多光頻譜,作物生長性狀,作物生理感測等量測。結合多種感測器的農用物聯網的原理與設計,與工商用途的物聯網完全,後端連接雲端系統,配合人工智慧進行相關的運算需求,但須考量所使用的感測器在農作或漁畜環境的耐用性與可靠度。智慧農業所使用的人工智慧,不僅涵蓋狹義的深度學習技術[4],更涵蓋廣義的專家系統,類神經網路,模糊邏輯,進化演算法,人造生命系統/群體智慧等技術,通常置放於雲端系統內執行,有時也使用於邊緣計算,增快系統效能,用於農作或漁畜飼養的生長性狀之影像理解,病蟲害辨識與預警,智慧環境控制。農用無人機大都採用旋翼方式,分成量測偵查與施肥施藥等兩種用途,使用於「巡田」、「農作」或「飼養」等任務。農用機器人是實現智慧農業機器及技術中之一種多功能的智慧農業機器,也是一種專業∕特殊用途服務型機器人[5],隸屬於場域機器人(Field robots),從事於農業、擠奶、畜牧、林業等農作功能。農用機器人有固定基座與移動等兩式。固定基座農用機器人的功能,類似工業機器人,用以執行固定位置的多種農作功能。大部分的農用機器人皆可移動,採用移動平台或導軌方式,進行多種不同形式的農業播種、栽培、收穫及漁畜養殖飼養等功能。
智慧農業生產所需的智慧農用機器人通常需與人工智慧,物聯網,感測器,自動化環境控制裝置相互結合。以下舉一例說明結合移動農用機器人與智慧科技的機的智慧型環控決策系統與病蟲害預警系統。如圖一的智慧型作物生長,環控決策系統與病蟲害預警系統的開發必須基於供分析與學習用的『耕作資料庫』,該資料庫內容需包含生產設施內的各項環境因子(整體環境的溫度、濕度、照度等以及培植體的pH值、EC值、礦物質成分等)的「環境感測資料」與作物生長情形(植栽間距、主幹高度、開花∕結實之位置∕高度、枝葉茂密程度∕通風透光程度、側芽∕側枝除取數、葉片∕面生長情況等)的「生理感測資料」;病蟲害發生的因由與症狀,以及能針對設施(溫室)內部的微氣候以及栽培體各項因子進行控制調整的環控設備∕滴灌與噴灑設施等。圖六的智慧型室內整合經濟作業生產系統之系統架構圖,該系統有環境感測,耕作資料庫,作物生理感測,人機控制界面,病蟲害預警,決策分析與控制,溫室控制設備,以及溫室機器人等模組。溫室機器人則用於作物生長時的授粉,而主要使用的人工智慧技術如深度前饋式網路(DCNN),卷積或折疊類神經網路(CNN)等,其中如Faster R-CNN, Mask R-CNN,MobileNet, AlexNet 等深度學習網路,已被學者專家用來分析與預測作業成長與病蟲害情況。當然該溫室也同時使用相同的機器人進行不同區域的任務執行。
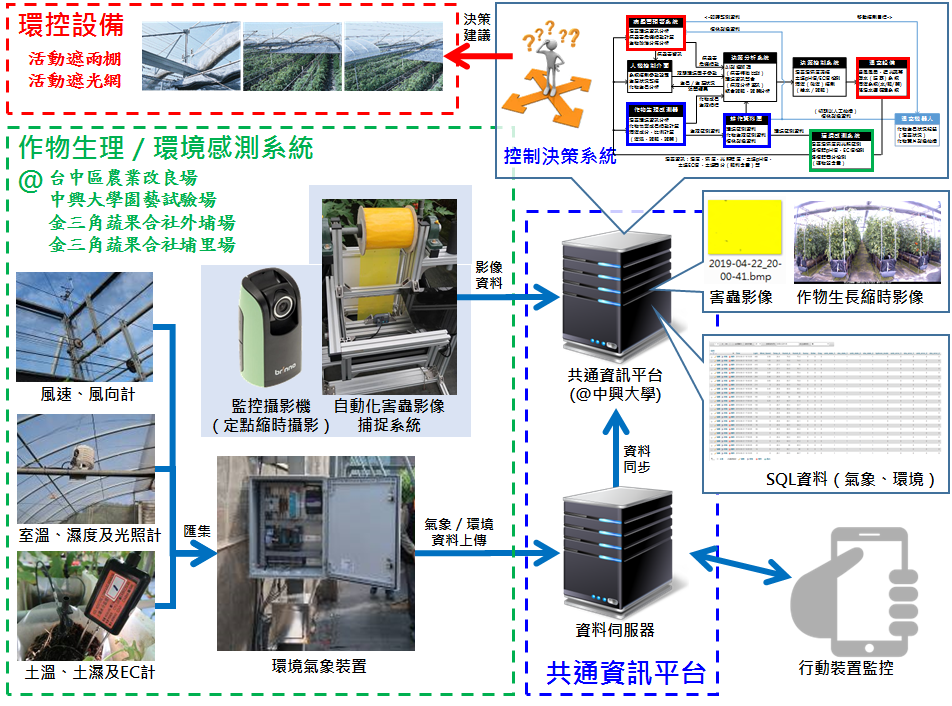
圖一、國立中興大學生機系、臺中農業改良場與金三角蔬果合作社合作之智慧型環控決策系統與病蟲害預警系統架構示意圖。
智慧農業生產有許多使用結合人工智慧,農用感測器,物聯網,農用無人機與農用機器人的應用範例。以下舉一例說明多台多陸空協作機器人與智慧監控系統的案例。該案例依據經濟作物的生長環境因子,病蟲害偵測量測的量測需求以及收穫預期評估,建立結合如圖二的多台陸空協作智慧農用機器人與監控系統,用以進行戶外經濟作物的生長環境因子量測,病蟲害偵測捕捉與施肥噴藥之關鍵技術研究,並進而建立實際可用的系統。本系統也可推展應用於陸空或海空漁畜飼養環境。
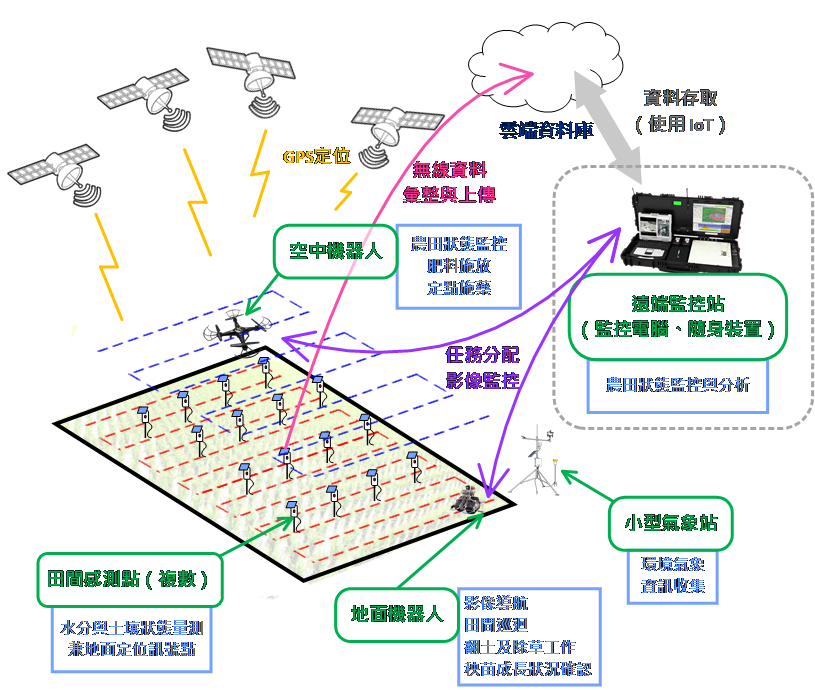
圖二、陸空多智慧農用機器人之戶外經濟作物生長環境因子量測,病蟲害偵測與施肥噴藥之工作示意圖。
農用無人機的研發與製作,在國外已行之有年,如美,日,歐盟與中國大陸等國的廠商,皆有成立公司專門從事農用無人機的製造,買賣與維修。我國在農用無人機的設計生產與研發,正方興未艾。在廠商部份。國內有經緯航太科技股份有限公司,可進行固定翼,直升或多旋翼等無人機研發、製造、後端資料分析。該廠商新近研發的神農無人直升機已用於農業噴藥使用,同時也開發可用於大面積作物災損狀況拍攝的翼龍無人機。在使用無人機於農作病蟲害,熱影像取像,多光頻譜掃描,土壤肥力,作物生長性狀等量測,國內已有不少的產官學單位進行技術研發,例如中興大學楊明德研究團隊進行無人機於農作生長與環境條件空中量測,台南農業改良場與成大航太所合作開發30公斤負載、噴藥用途的多旋翼無人機,交通大學與宜蘭大學等研究團隊使用自行開發的無人機或商用無人機進行果園或特殊作物(松露)的生長與環境等資料。整體而言,國內的農用無人機使用已漸趨成熟,但在大面積的漁畜養殖飼養之應用,尚待努力。
在農用機器人的設計,生產與應用方面,我國尚未有專為農作播種、病蟲害防治,栽培、收穫及漁畜養殖飼養等功能而設計生產的專業服務型機器人。因為農作或漁畜養殖飼養的功能需求截然不同,農用機器人的設計生產與應用也有甚大變異。以下以噴藥與採果為例,說明農作機器人的發展與應用。至今,國內外的噴灑農藥的農用機器人都建基於自動導航車(AGV)的架構,裝置合適的超音波感測器,或雷射感測器,或全球定位系統,影像偵測,或室內定位裝置等裝置,配合適當的有導軌或無軌式的導航控制系統,即可進行室內或室外農作環境的噴藥作業。國外廠商已有設施內行駛的植保噴藥機器人。除噴藥需求外,目前國內研究者使用的採果農作機器人,皆使用工業界現有的工業機器人,如PUMA,或具有人機協作功能的UR機器人,將其裝置於自動導航車上面,再加裝簡易的力感測器,進行採設施內的葡萄,草莓,紅椒或彩椒,或機器授粉等的農作機器人。就技術發展而言,國內有許多可生產AGV的廠商,有機會可配合智農需求,研製可移動式的農業機器人。另外,國內如達明與工研院等公司已研製具人機協作功能的協作機器人,有機會可被應用於採果或其他需要人機協作功能的農作功能。
對於進一步的智慧農作管理部分,主要還是以每日的巡田、鋤草、施肥與噴藥的勞動負擔的降低為主,除了透過小型自動化農具外,近年使用無人機(植保機)進行大面積的快速施肥與施藥也是其中一種降低農民負擔的方式。然而隨著用藥觀念的改善以及精準農業的推廣,希望能準確把握施肥與用藥量,降低資源的浪費以及對環境的污染,透過各種不同的感測器,尤其是影像視覺化分析判斷的生長情況來決定施肥與用藥的智慧農業變成了發展的重點之一。以往通常仰賴農民自己的經驗以及氣候的變化來判斷,現在逐漸朝向將這些經驗數位∕數據化進行分析,透過設置氣象站以及田間感測器來收集環境資訊,將耕作資訊建立為資料庫進行分析,透過專家系統來實現耕作輔助系統,農民僅須透過遠端監控數據的分析結果與建議決定要進行的應對內容的數位化智慧農業將會是未來的趨勢。數位化智慧農業將會仰賴整合了電機、資訊、植病、生機等跨領域人才,配合農民的實際耕作經驗來建置自動化生產管理系統,並且透過物聯網與目前的各種自動化農機進行整合,藉此實現完整的智慧自動化農業生產系統。除此之外,對於作物的生理分析,尤其是生長狀況以及是否有受到病蟲害的分析判斷,以及基於環境氣象資料的分析預警系統也將是另一個發展的重點。也可以說,只要有了完整的環境與作物資訊的收集與分析系統,配合能自主執行農作的智慧自主化農機,智慧農業當中最重要的自動化生長與管理系統便能得以實現。
在作物採收與後續的作物處理與儲運等方面,對於稻作部分已經擁有相當成熟的收割與稻穀乾燥與儲藏的自動化設備,但是對於較為柔嫩的蔬果類作物,目前大多還是得仰賴大量人工進行採收。目前已有使用機器手臂,配合軟性∕撓性機械夾爪進行採收的設備,可透過影像視覺分析判斷作物是否已可採收,且自動進行抓取位置與採收方式的判斷,自主完成採收作業。然而現有技術的限制,還無法加快分析與判斷的速度,夾取作業也會因為擔心傷害到其他作物而使採收的移動路徑規劃有所延遲,以致於採收速度仍遠低於人工作業。這部份可透過人工智慧技術以及演算硬體,還有採收裝置硬體機構的進步來克服,讓機器能以相仿,甚至超越人工的準確率以及速度自動化進行採收作業。至於儲運部份,主要還是對於產品的分級與包裝的人力需求為主,目前的自動化分級包裝管理系統還是以秤重式進行初步自動化分類,最後透過人工目測驗證後進行包裝的方式進行,目前已有廠商開始利用影像為基礎的深度學習分析系統來進行瑕疵檢測,並以抽樣方式進行糖度、果形、大小、著色率、瑕疵率和重量等品質指標的檢測,未來若能實現準確的非破壞式檢測,將有望透過自動化設備進行更準確的分級與品管,維持固定的判斷條件並有效降低仰賴人力的人工判斷的需求。
而對於全智動化智慧栽培設施,也就是全智動化植物工廠的建立,則是智慧農業的一種理想發展模式。希望透過建置智動化管理的環境,提供作物最佳的生長環境,並由育種至採收的一貫化作業,徹底實現精準農業並有效的控制產量與品質,對於缺乏穩定糧食來源的現代社會來說,將會是重要的嘗試與發展方向。然而目前為了達到精準管理環境所需花費的成本依舊過高,當未來智動化設備的發展與智慧農耕技術的進步達到一定程度後,低成本、高產量、可穩定生產的作物生廠工廠將不再是夢想。
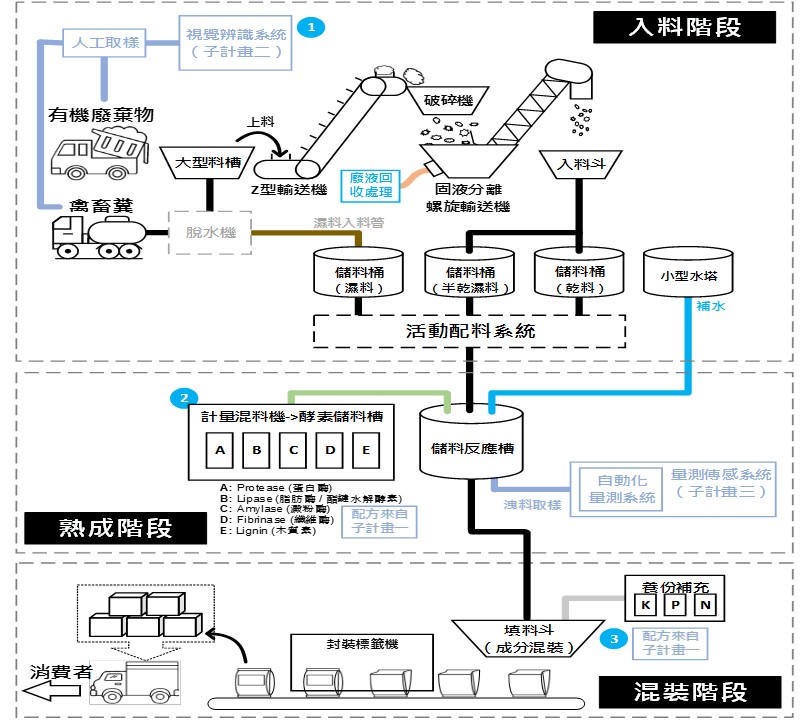
圖三、國立中興大學土環系之有機廢棄物快速熟成工廠系統架構示意圖。
最後對於農產與漁畜產品的有機廢棄物處理的智動化。傳統的農業廢棄物處理多以焚燒方式進行,但容易造成空氣汙染;而畜牧業產生的禽畜糞廢棄物更是大量且難以處理;若要使用這些有機廢棄物做為肥料使用,養分有效且成效不高,若要製作成熟成後的堆肥佔地且曠時,且易因為熟成過程中產生的異味造成等同空氣汙染的環境影響。在農業循環經濟下,逐漸有農業廢棄物,如筊白筍的廢棄物與雞糞,製作成有經濟價值的再製品或有機質肥料之研究。另外如近年中興大學楊秋忠院士研發團隊的研發成果,如圖三所示的人工智慧有機廢棄物快速熟成工廠系統架構示意圖,可適當結合機器人的操作,已可實現3小時內的有機肥快速熟成,讓這些有機廢棄物能夠快速地製成有機肥,有效的對這些廢棄物毫不浪費的進行循環再利用,真正實現循環耕作經濟。
綜觀以上的智慧農業發展需求,短中期的農用智慧系統,智慧農用裝備或機器人之可能努力的發展方案有6案。其一是以深度學習為基礎的病蟲害辨識系統與早期預警以及相關配合措施,其二是結合深度學習與專家系統所得的可解釋人工智慧系統(XAI),其三是結合機器人與人工智慧為基礎的智慧環控技術,其四是異質多台農用機器人合作或協作,其五是含有力控制與人機協作的智慧農作或漁畜飼養機器人,其六是具有邊緣運算與人工智慧的農作物聯網與雲端運算系統。
在結論部分,從科技部與農委會所提的智慧農業目標與策略,以及上開對現今台灣智慧農業生產技術的討論,目前對於智慧農業的發展,需致力於智動化農作設備的發展,透過整合各種環境與作物感測器的設置來有效掌握田間情況,並透過大量耕作資料與人工智慧,發展低人力需求、全智動的作物生長管理系統將會是為來主要發展的目標;而發展不對環境造成負擔,有效實現循環經濟的農業廢棄物管理也將成為重要的發展目標。為此,透過農業相關人才發展農耕技術的本土化、耕作資訊的數位化分析,以及利用物聯網串聯智動化農機的智動化農機與生產管理系統將會是發展重點。未來隨著技術的發展,農業機器人的效率將會不斷提升、成本下降,管理系統也將隨著耕作與氣象資料的累積,能夠提供更準確地耕作建議,最後全智動化農業在產量和可持續性上超過傳統耕作方式,相信並不會需要太久的時間。

國立中興大學電機工程學系